The data inputs to a FIS can be in a variety of formats. Manual soil samples are taken at grid intersections in the field. Some implement-mounted sensors can produce continuous signals, but only along the paths of the sensors across the field. Data from satellites are often presented in the form of geo-referenced images. The images can be converted into geo-spatial maps.
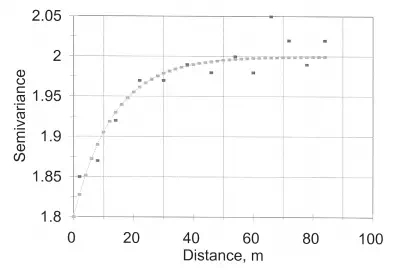
In making decisions regarding management of any given point in a field, it is desirable to consider all of the data relevant to that point. These data are present in the form of overlying maps (see Figure 6.3) in the FIS, but the maps must be coordinated. Each map must have the same perimeter boundary, the same horizontal scale and each point within the boundary must be represented by data. A data interpolation scheme is used to estimate the given crop production factor at unmeasured points. Kriging is an interpolation technique that makes use of a semivariogram, i.e., a measure of the spatial dependence between samples of a given production factor. A semivariogram (see Figure 6.4) shows the increase in variance of some factor (e.g., soil potassium) between samples as one moves away from a given point in the field. Beyond a certain point (about 50 m in Figure 6.4), the variance no longer increases with distance and the area within this distance of the point is called the neighborhood of the point. Interpolation by kriging puts increasing weight on samples that are increasingly close to the point whose data value is to be estimated. Because the calculations become onerous if too many sample points are included in the interpolation, only those data within the neighborhood of the point are used.
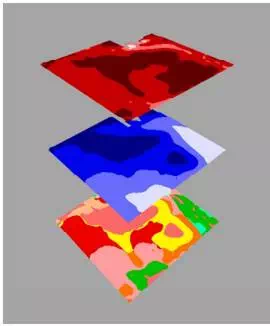
Overlying maps in a GIS.
It is impractical to map the precise level of a crop production factor at every point in a field. Instead, the field is subdivided into smaller areas in which a crop production factor varies within defined limits and is considered uniform. Maps can be in either raster format or vector format. In raster format, the field is subdivided into small square grid cells, within each of which a crop production factor is considered to be uniform. In vector format, straight-line (vectors) are linked, end-to-end, to enclose polygons within which a crop production factor is uniform. Each vector is represented by the coordinates of its two end points. The map in Figure 6.2 is in raster format. Note that multiple adjacent cells can make up larger areas of a uniform crop production factor and these larger areas approximate the polygons of the vector-based maps. The smaller the square cells, the more nearly the raster maps resemble the vectorbased maps.
The overlying maps of Figure 6.3 are vector-based maps. Software is available to convert maps from raster format to vector format or vice versa.
Data analysis in the FIS
An important use of a FIS is to generate application maps. For example, a potassium application map would show the desired application rate at every subarea in a field. Algorithms in the FIS are used to generate application maps based on an analysis of all of the relevant crop production factors mapped in the FIS. Generating target yield maps is an intermediate step, because nutrient needs increase with target yield. There are three different approaches to generating target yield maps. One approach is to develop a mathematical model to predict yield based on the soil factors mapped in the FIS and on the probable weather, especially rainfall, in the coming season. Because of the complexity of crop growth and the unpredictability of weather, this approach has met with only limited success. A second approach is to map the actual yields of a crop, e.g., corn (see Chapter 12), for a number of years when the entire field is being farmed conventionally, i.e., uniformly. The idea is to identify subareas that yield consistently low or high as an indication of the yield potential of these subareas. This approach has also given only limited success because of poor repeatability. For example, a poorly drained low spot in a field might have very low yields in a wet year, but have the highest yields in a dry year. The third approach is to use a vision sensor or other radiometric device to sense the condition of the crop during the growing season and to apply fertilizer at rates appropriate to the condition of the crop in each part of the field. More research is needed on the generation of target yield maps and application rate maps.



